

RTK (Real-time kinematic) refers to real-time dynamic measurement, also known as carrier phase difference positioning, which is a kind of GNSS relative positioning technology, which can provide the three-dimensional coordinates of the observation point in real time and achieve centimeter-level high accuracy. Similar to the principle of pseudorange difference, the base station transmits its carrier observations and base station coordinate information to the user station in a timely manner through the data link. The user station receives the carrier phase of the GPS satellite and the carrier phase from the base station, and composes the phase difference observation value for timely processing, which can give centimeter-level positioning results in time.
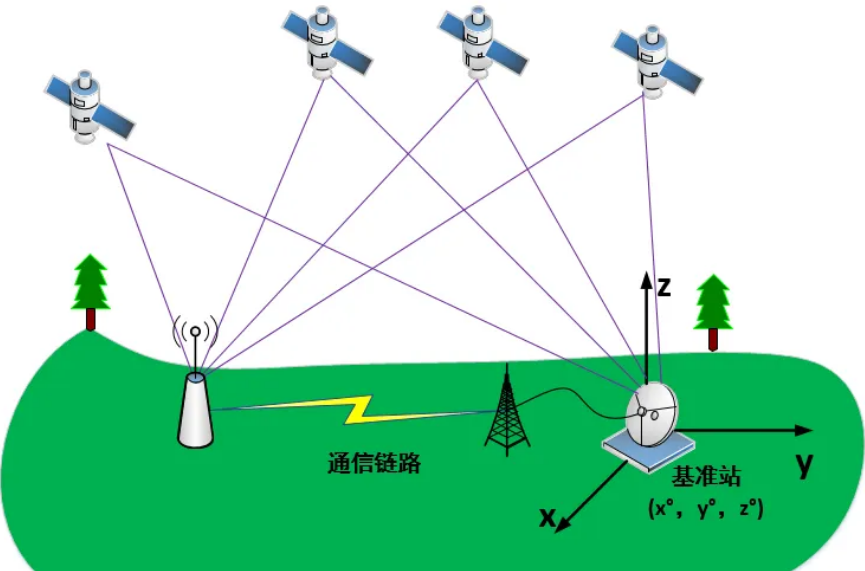
The RTK differential positioning system mainly realizes high-precision dynamic relative positioning through the real-time data link between the base station and the rover station (receiver position) and the fast solution technology of carrier relative positioning. The specific implementation method is, set up a fixed base station on the ground (to ensure accurate calibration of position), used to receive satellite signals, provide users with differential services through two ways, one is to use the known base station position to calculate the error in the received signal, the error is transmitted to the nearby user receiver through the form of network broadcast, because the error of the reference station and the receiver end has a correlation in time and space, after the error is subtracted at the receiver end, is a high-precision position information obtained. Another method is to send the observations received by the base station receiver directly to the user, who eliminates or reduces the effect of the error by "differential". This is the basic principle of high-precision GNSS positioning technology. The second method is more effective, so it is widely adopted.
Since the wavelength of the carrier phase observation is only 1/100 of the corresponding pseudorange observation, the measurement accuracy is relatively high, so the carrier phase method is usually used for precise positioning. However, due to the limitation of satellite signal structure, there is always an initial phase full cycle in the phase observation measurement, so the solution of the ambiguity of the whole circle of the satellite signal has become a key problem for precise relative positioning using the carrier phase. Accurate and fast calculation of the ambiguity of the whole circle can not only shorten the positioning time, but also ensure the relative positioning accuracy.
The main idea can be divided into three steps:
(1) the standard least squares adjustment to find the baseline and the whole circle ambiguity floating-point solution;
(2) integer least squares estimation to find the fixed solution of integer ambiguity;
(3) Baseline fixed solution.
Estimate the fixed solution of the integer ambiguity; (3) Baseline fixed solution.
In the process of differential positioning, there are three parts of error:
The first part is common to each user's receiver, for example, satellite clock error, ephemeris error, ionospheric error, tropospheric error, etc.;
The second part is the propagation delay error that cannot be measured by the user or calculated by the calibration model;
The third part is the errors inherent in each user's receiver, such as internal noise, channel delay, multipath effects, etc.
Advantages of RTK differential positioning system:
(1) Eliminate satellite clock aberration
(2) Eliminate satellite ephemeris errors
(3) Eliminate ionospheric delays
(4) Elimination of tropospheric delays
Generally speaking, the accuracy of ±5m can be reached by the difference in the coordinate mode, the accuracy of ± (1~3) m can be reached in the pseudo-range mode, the accuracy of ± (1~3) cm can be reached in the carrier phase mode, and the elevation accuracy is 2~3 times of the plane accuracy.

(1) Satellite signal receiving system: there must be more than 2 positioning receivers located on the base station and the rover, if the reference station is at the same time when the multi-user service, the dual-frequency receiver needs to be selected, so as to ensure that the sampling rate and the sampling rate of the rover reach the same.
(2) Data transmission system: The data transmission system is mainly formed by combining the data transmitter device of the base station and the data receiving device of the rover station, which is an important equipment in RTK technology.
(3) Software solution system: The software solution system can effectively ensure the correctness of the measurement results of the RTK system. For example, the real-time dynamic measurement with the carrier phase as the observation quantity is mainly to accurately determine the initial full circle unknowns of the carrier phase, the continuous tracking of the satellite in the flow observation, and the reinitialization after the loss of lock.
Using differential positioning technology, the first part of the error can be completely eliminated, the second part of the error can be eliminated for the most part, which mainly depends on the distance between the reference receiver and the user receiver, and the third part of the error can not be eliminated.
Features:
System-wide, full-frequency satellite tracking
Best-in-class GNSS observations and RTK positioning accuracy (centimeter-level)
Best SwaP (Size, Weight & Power)
AIM's advanced anti-jamming and anti-spoofing technology
Industry-leading 100 Hz update rate < ultra-low latency of 10ms
The GNSS heading, which is ready to use from initialization, eliminates the requirements for vehicle dynamics and the reliance on geomagnetic sensors
Easy-to-integrate GNSS rover receiver
Related Products:




Long Press to Scan QR Code
Scan QR Code

